Milestones
General Contents
ROS Packages
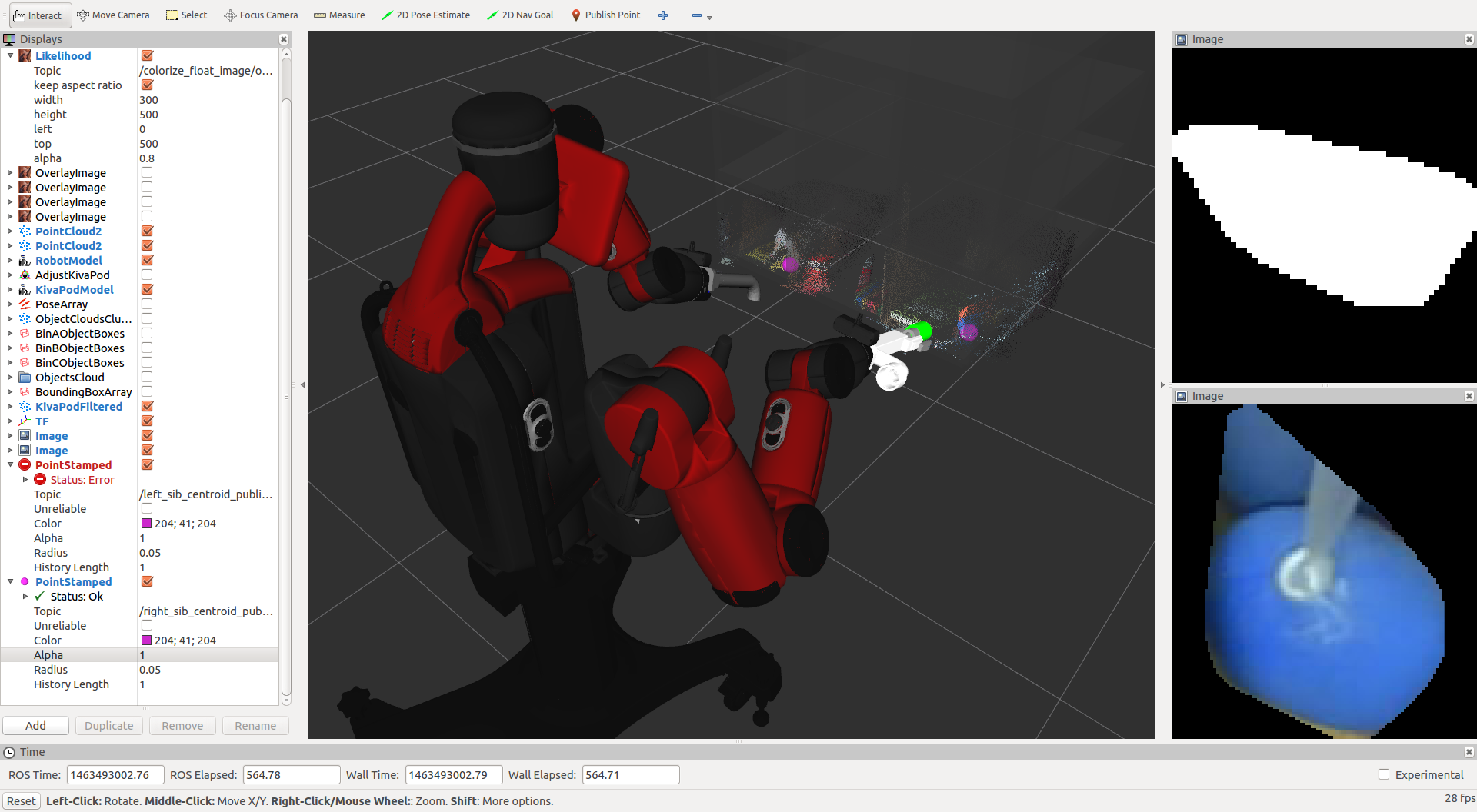
Segmentation in bin with softkinetic camera
resize output mask image
fix camera info
add robot self filter
get proper centroid position
it works good, i think :)
https://drive.google.com/file/d/0B5DV6gwLHtyJX2N3aHhGN0FMczg/view?usp=sharing